D.A.R.T. Autonomous Projectile Launcher
Final Report for ASI 403
Project Team
- S Shyamkumar A0251760J
- Ong Jian Wen A0252100E
- Veejay A0261513N
- Barry Ang A0258254Y
Supervision & Faculty
Adjunct Prof Goh Cher Hiang
Graham Zhu
Innovation & Design Programme
College of Design and Engineering
National University of Singapore
Introduction
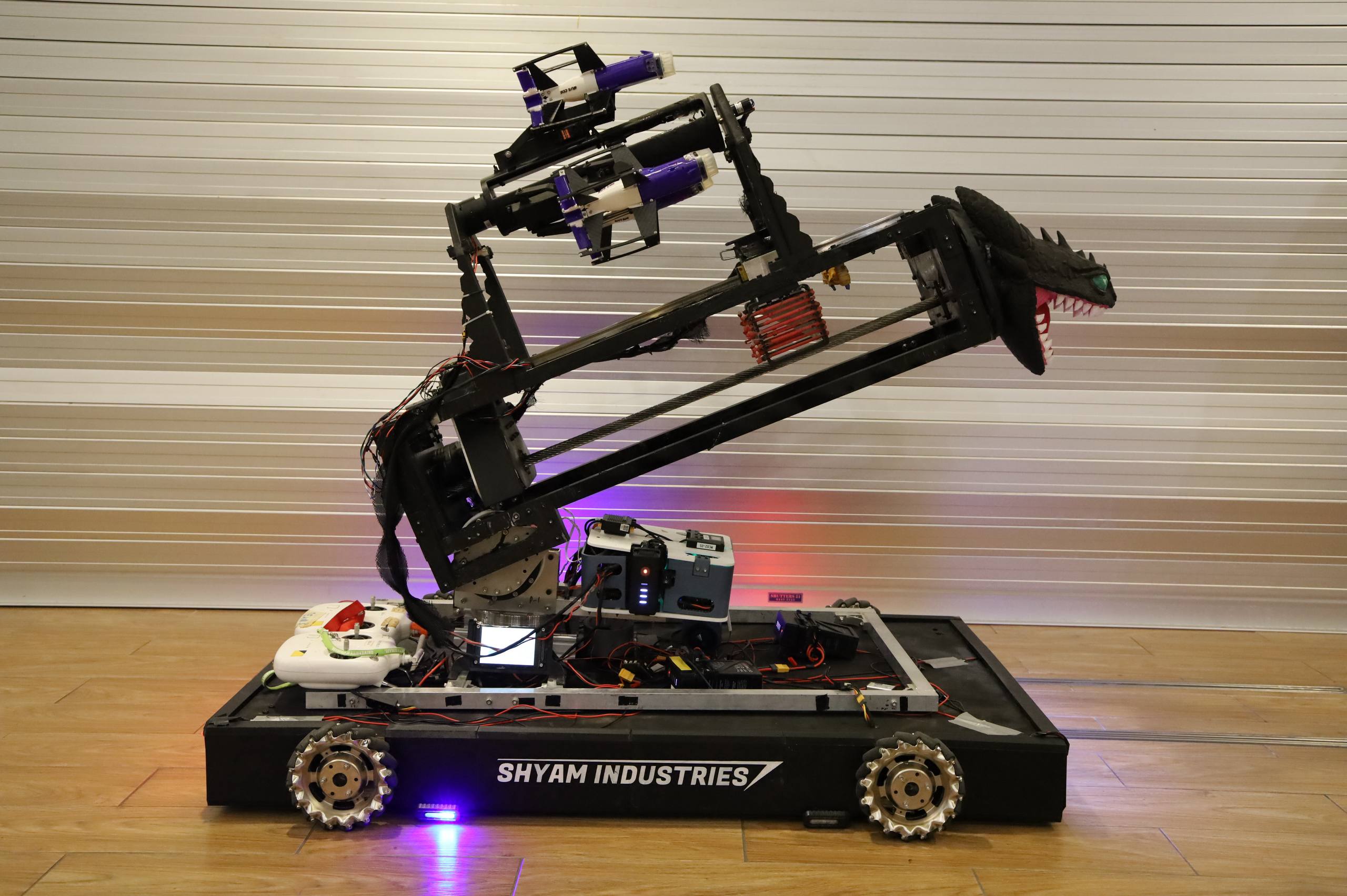
Full Robot Interactive Rendering
This project aims to develop a dart robot and projectile for the RoboMaster University Championship (RMUC), an international robotics competition organised by DJI. The system is intended to accurately hit designated battlefield targets, particularly the opponent’s Base, within the competition’s launch window constraints. To support this, the project includes the development of a robot featuring an elastic band-based launcher, with adjustable pitch and yaw control, automatic projectile reloading, in-flight corrective capability for an active projectile, and an accurate target mock-up for testing. Predictive maintenance, ease of debugging, and maintainability are also prioritised.
The project builds on challenges observed in NUS Calibur Robotics previous dart robot attempts. Earlier projectile designs showed unstable flight due to poor aerodynamic performance, while past robot designs faced issues in pitch-yaw control, structural stability, and release consistency. In response, the current design adopts an improved projectile focused on aerodynamic stability and active trajectory correction, alongside a more stable launcher with stronger actuation and structure. The previous flywheel launcher concept is also replaced with an elastic band launch system to improve consistency and accuracy.
The project also supports key stakeholders such as NUS Calibur Robotics goal of qualifying for RMUC by delivering a competition-ready dart system that meets the RoboMaster Organising Committee’s (RMOC) rules and technical assessment requirements. The proposed system is intended to be simple, accurate, and maintainable, while improving the team’s technical readiness and overall competitiveness.
Meet the Team

S Shyamkumar
Y4 Mechanical Engineering
- • Projectile Design
- • Feeder Design
- • Launcher Design
- • FYP Website Design and Layout
- • FYP Poster
- • FYP Publicity Video

Ong Jian Wen
Y4 Mechanical Engineering
- • Pitch Design
- • Yaw Design
- • Base Target
Veejay
Y4 Electrical Engineering
- • Projectile Electronics
- • Target Tracking
Barry Ang
Y4 Electrical Engineering
- • All Subsystem Electronics
D.A.R.T subsystems
Click to view each subsystem
Conclusion
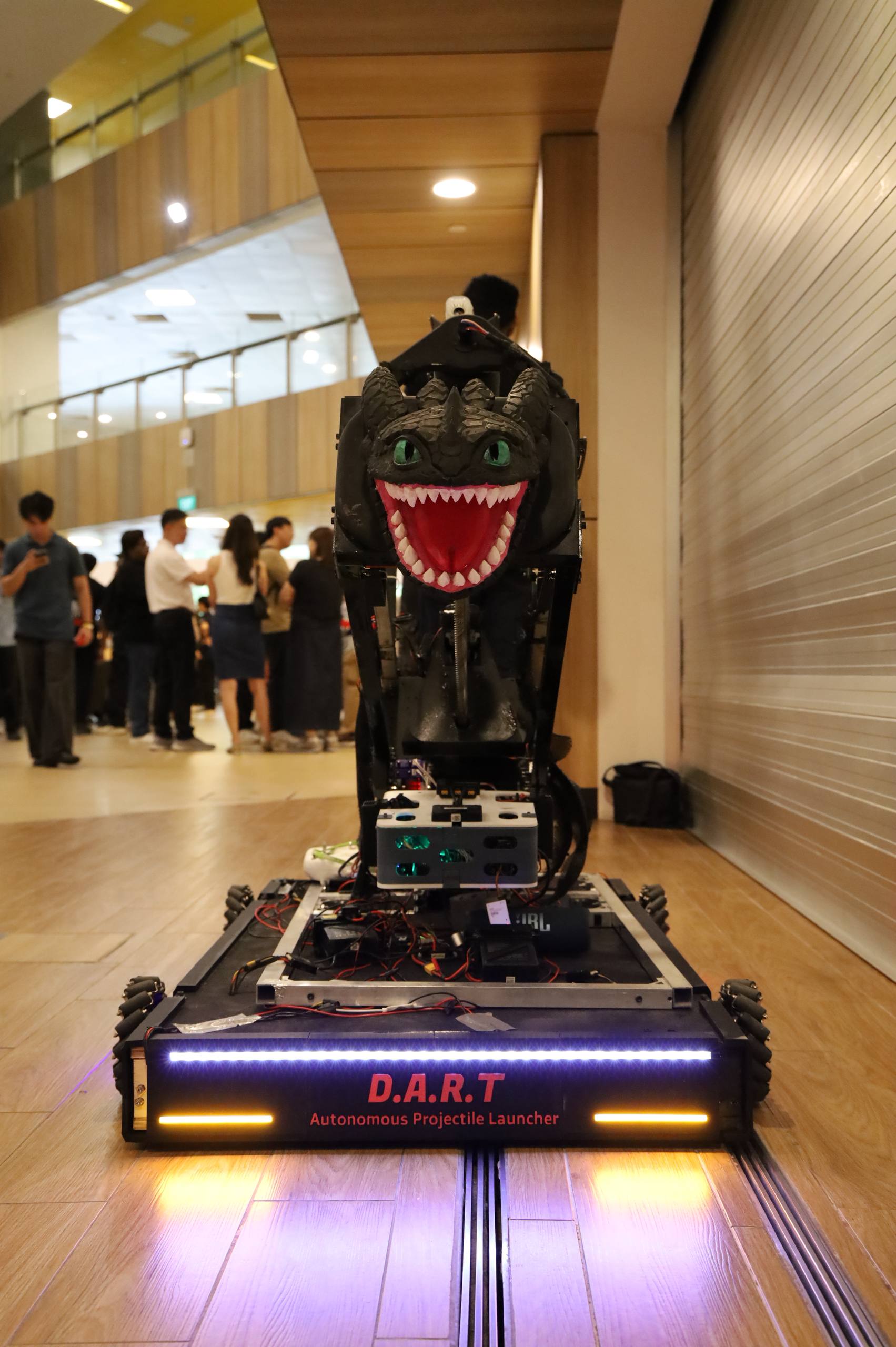
D.A.R.T. is fully operational.
This project delivered the development of a complete dart robot and projectile system from the ground up, covering the full process from design and fabrication to integration, testing, and validation. Rather than stopping at individual concepts or isolated subsystems, the work resulted in a functional prototype and product supported by structured engineering development and verification.
The project also met the main milestones and requirements defined for both the robot and projectile. On the robot side, the system satisfied the required specifications in dimensions, automation, mass, payload capacity, power source, pitch range, and electronic integration. On the projectile side, the design met the required limits in dimensions, power, mass, electronics housing, and autonomy, and was validated through fixed-target, random fixed-target, and random moving-target testing. These outcomes show that the project progressed from requirement setting to a working system with measurable results.
We would like to sincerely thank Graham for his incredible engineering insights and assistance. There were times when the Team felt both discouraged and worried when the initial prototypes showed unpromising results. With the strong guidace from Graham, the project was redirected to a new idea and came to a success, and the team greatly appreciates his guidance.
It is also notable that the project was completed within 8 months, while completing all reports, presentations and documentation. The standard Calibur Robotics Robot team takes a year to fully validate and complete a robot from scratch. Moreover, the D.A.R.T robot was completed with the EDIC allocated budget of $3200 and $200 from Calibur Robotics, which is way lesser than the average ~$5000 used by other robots. 85% of the robot's parts were custom fabricated by Shyam free of cost, which helped reduce fabrication time and budget cost.
Taken together, our work provides NUS Calibur Robotics with a solid technical base for further refinement toward RMUC participation, where teams are expected to design and build robots that satisfy formal competition rules and assessment requirements.
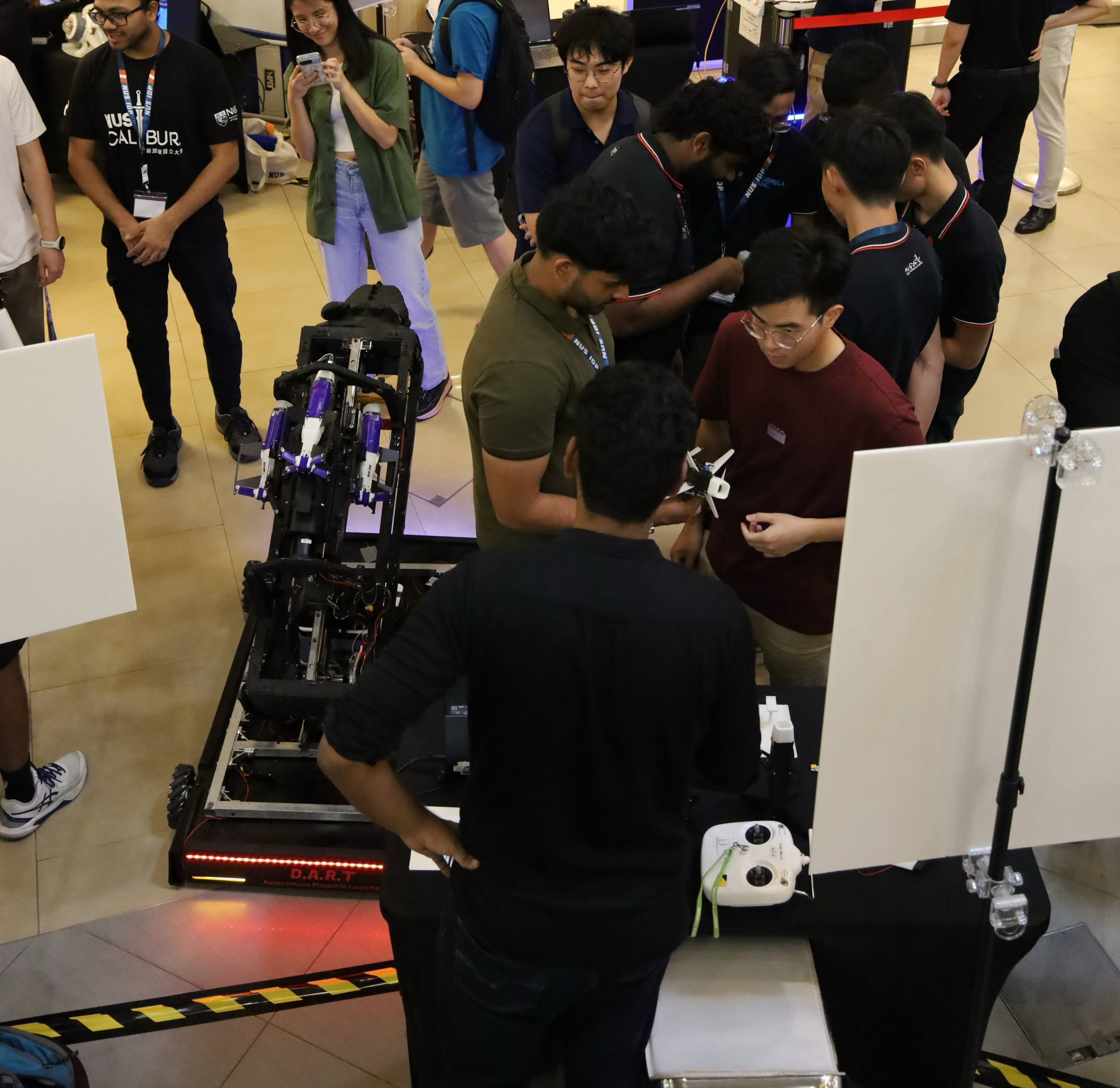
Additional Media
A visual chronicle of the D.A.R.T. platform, documenting the transition from laboratory prototype to final system demonstration. These are the publicity video made by Shyam and the images taken during the project showcase itself. https://www.linkedin.com/feed/update/urn:li:activity:7449956044916813824/?utm_source=share&utm_medium=member_desktop&rcm=ACoAAEvuQ6UB3Lrlei8-uh3g-7taM4cJr3kFi4M